Plant Watering Project - the story Last Year
So - its almost April and I have a long weekend to take a stock of things. One this I remember is the Plant Watering Project. I had named it WatrrBot.
Last year, 2017, I decided to make a circuit that could be used to periodically water plant pots in the balcony of my house.
The circuit design went well and following were the components I learnt and programmed:
- Arduino Pro Mini 5v: works just like the Arduino Uno, only much more compact. Was using two of them - one as a master and second one as a slave. The master did the jobs of controlling the LCD display, accepting user input from the rotary encoder and reading time from the RTC.
- LM7805 Buck Converter: This was the part that messed it up - more about that later.
- Rotary Encoder: Worked like a charm - although initial programming was a bit time consuming - but once I cracked how to code it - things were breeze.
- 16x2 LCD Screen: Nice screen with blue led backlight - this may have been another culprit but I still doubt the LM7805 Buck Converter.
- DS3231 RTC: No complaints here - worked like a charm with the correct library.
So - the above video shows the LM7805 buck converter that I ordered from a local vendor on ebay.in. But - after a few days of working - the converter burnt both my Arduino boards.
Otherwise - the assembly worked really well on the breadboard and looked like an early stage prototype of any gadget:

So - why I write this blog post? Since this failure - I have understood that I had made a mistake somewhere in selecting the stepdown of the power supply. So I did three courses on Coursera.org:
- Introduction to Electronics - Georgia Tech
- Introduction to Power Electronics - Uni of Colorado - Boulder
- Converter Circuits - Uni of Colorado - Boulder
And now - I have a slightly better understanding of step down converters and which one to select for my project.
Starting today - I put a renewed effort in making this circuit - lets see how far it goes this time. This time:
- The LM7805 is replaced by a compact buck converter that can convert 1 to 24 volts to 0.8 to 12 volts. Another change is - instead of the 16x2 LCD - I will use a 0.96’’ OLED display (ordered from Aliexpress - should be here in a month).
- Instead of using two boards (master and slave) - I can use a single board and use RTOS to perform the many tasks. We will have to plan this.
- Instead of the gadget being continuously powered by a wall power supply - I can inclue 4 18650 batteries in it so that charging can be done only when required. This will involve learning and developing an inhouse battery management system for a 4S configuration.
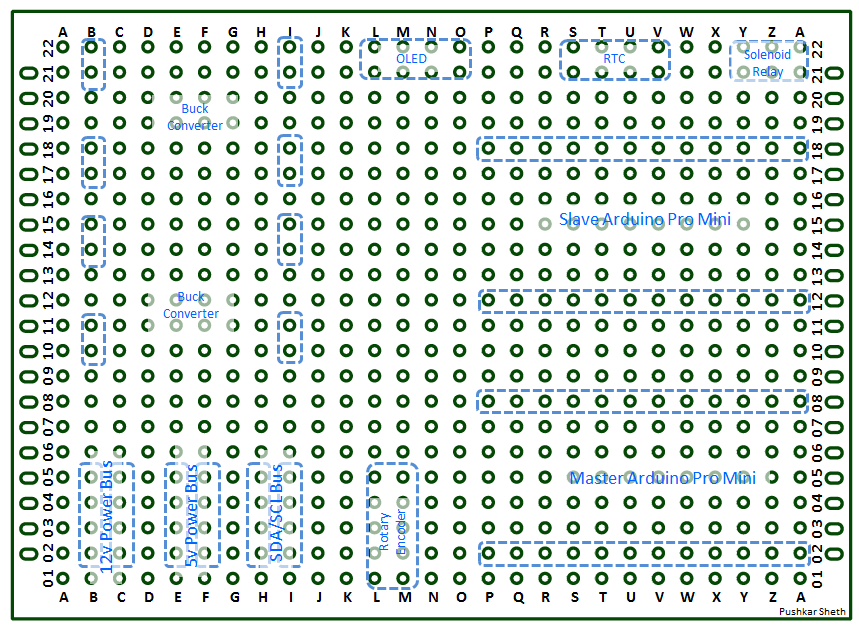
Plan for the perfboard:
Update: I uploaded the code to an arduino uno with all the connections, following are the observations:
- the rotary encoder does work - but the response is very sporadic and inconsistent. Need to relook at how the encoder is put to work. Also check how to make it work within RTOS
- The 16x2 LCD also behaves sporadic - might have to move to an OLED (parts already ordered)
- Need to figure why this instability.